好奇心を、技術に変える。
「できるかどうかわからない」に飛び込んできた記録。ドローン、LiDAR、AMR(自律走行ロボット)——しあわせもの工房の研究開発の軌跡です。


— コンセプト
「人に身近で、愛嬌があって、人の役に立つドローン」——それがネコプターの目指す、人と協調するドローンの未来です。しあわせもの工房では2013年に超小型研究用ドローンを開発しました。
第一に安全で、小型で、操縦をしなくとも人についてきたり、自分で考えて飛行(自律飛行)できることを意味します。
近寄りがたいゴツいイメージのあるドローンに対して、容姿や態度が可愛らしく、"守ってあげたくなるような"そんな存在になれないかということです。
ドローン自らが人の危険を守ったり、いざという時に駆けつけてくれたり、楽しませたり、そんな頼れる存在でありたいという思いからです。

— 概要
低床型パワフルモビリティーロボット。Noruno Thinは小型で力持ち。ご家庭内でのあらゆる物流をサポートします。
- UI スマートフォンのWi-Fiで走行を自在にコントロール。オプションでBLE対応。
- 薄型・力持ち 厚さ約7.5 cmの低床ボディ。最大80 kgの積載能力。エンコーダ付ブラシレスモーターと専用コントローラを搭載。
- ROS対応 ROSノードスタックを標準搭載。PCへのUSB接続でROSに対応。
イメージPV

— コンセプト
ホビーユーザーでも活用できるLiDARを提供し、LiDARに民主権を与えたい。そんな想いから、安価・簡単に活用できる「おうちLiDAR」を開発中です。
イメージPV

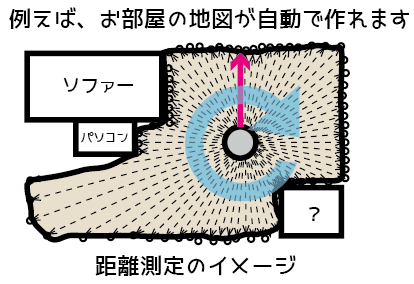
- ROS対応 ROSノードスタックを標準搭載。PCにUSB接続するとROSでlaserScanトピックが受け取れます。
- スキャン能力 最大40 m・最小0.1 mの距離を360°スキャン。1 cmの直線距離分解能。2 rps時に約1.4°の角度分解能。
- ハイブリッドセンサ レーザーセンサと超音波センサをハイブリッド搭載。9軸IMUを標準搭載。
- SensorFusion対応 レーザーセンサと超音波センサをセンサフュージョンすることで、光では検出できない物体を補正して検出します。(特許出願済み)


— 概要
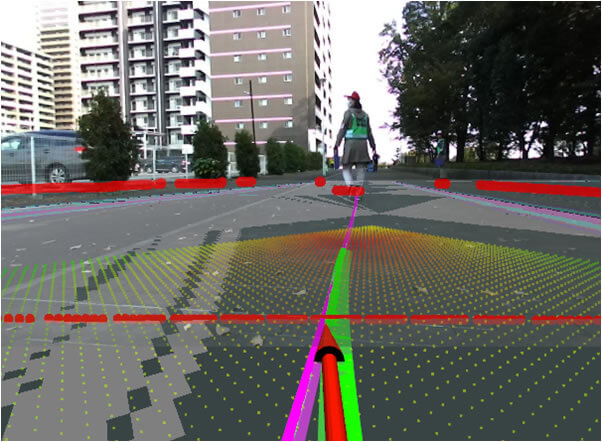
NorunoはROSベースのAMR(Autonomous Mobile Robot)です。2D-LiDARやステレオカメラ・RTK-GPSを搭載し、SLAMを行いながら屋外を自律走行します。つくばチャレンジ2018にて完走(自律走行マイルストーン3達成)を果たし、走行時間は約43分でした。
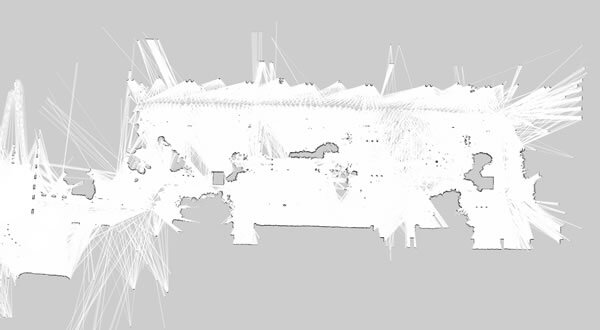
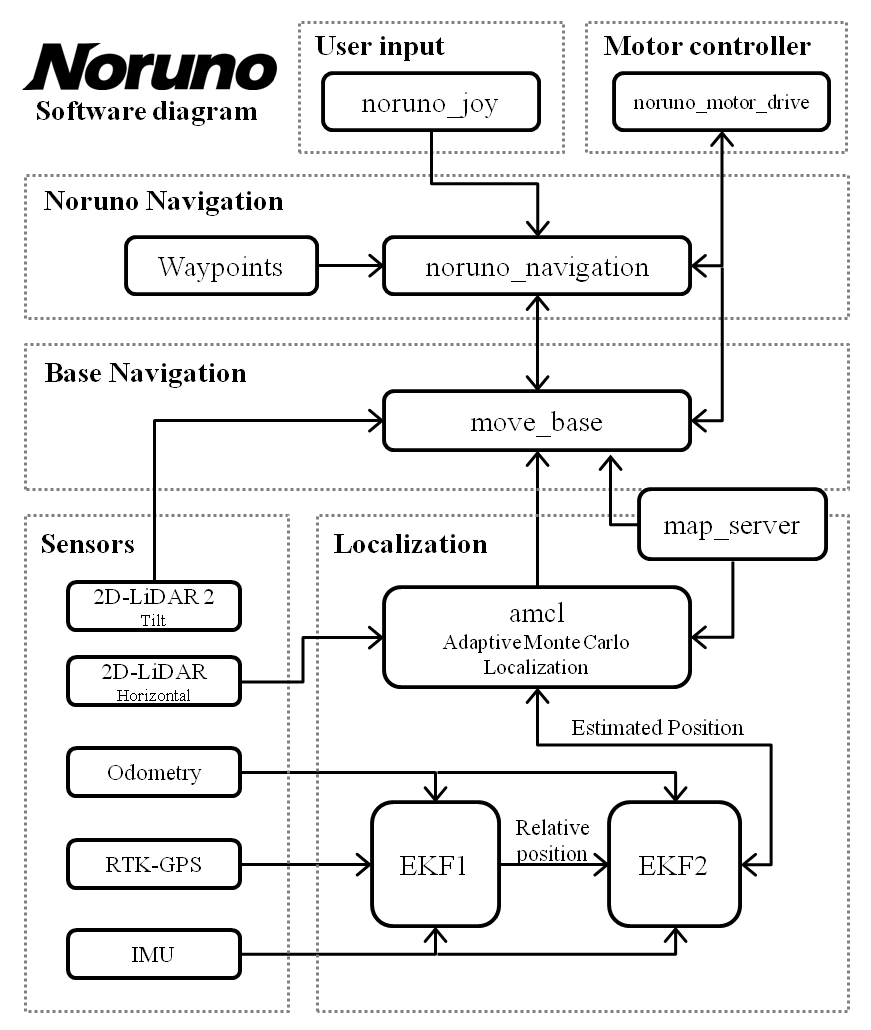
- SLAM 水平配置の2D-LiDARで地図生成と自己位置推定。傾斜LiDARで路面上の低い障害物を検出・衝突回避。
- ステレオカメラ ビジュアルオドメトリ評価・RGB-D SLAM実験・信号認識を目的として搭載。
- RTK-GPS Ublox製RTKモジュールを採用。EKFによる高精度なオドメトリで、スキャンマッチングのずれを最小限に抑制。
- メインPC NVIDIA Jetson TX2内でロボットの全制御を実施。
本体にはLTEルーターを搭載し、RTK基準局のキャスターサーバーからNtrip(Networked Transport of RTCM via Internet Protocol)を用いてRTCMを受信。このRTCMメッセージをUblox製RTK-GPSモジュールに再送信し、モジュール内部でRTKの測位を実施させました。完走の要因は、EKFによる高精度なオドメトリ(RTK-GPSベース)を十分信頼して占有格子地図を生成したことで、環境変化があってもスキャンマッチングのずれ量を小さく抑制できたことにあります。
つくばチャレンジ2018「おうち未来プロジェクトPV」
「正解がわからない」も、一緒に考えます。
新規技術開発・実証実験・研究支援についてのご相談もお気軽にどうぞ。
技術的な不確実性の中でこそ、並走できる強みがあります。